
In this post you will find information on:
- What are the equilibrium equations?
- Equilibrium equations for a plane force system (2D)
- Equilibrium equations for a spatial system of forces (3D)
| Equations of equilibrium are used to describe the state of a body which, is in equilibrium. Such a body does not change its position, that is, it is at rest. |
The sum of all forces and moments acting on a body at rest must balance, we describe this mathematically as follows:



Flat system (2D) - equilibrium equations
The above equations are valid in flat power system. We use them to determine reactions for beams, frames and trusses. These types of elements are basic problems of statics. In such tasks we care that the elements remain at rest. If the bodies move then we talk about other branches of mechanics such as kinematics or dynamics.

In a plane system, a body can move in the x and y directions and rotate around the z axis facing us. In a plane system, a body has 3 degrees of freedom. And in order for a body to remain at rest we have to balance these 3 degrees of freedom for it. And it is for this purpose that we use equilibrium equations. If the balance of x and y forces and the sum of moments is equal to zero, it means that the body does not move or rotate.
A specific type of flat layout is flat convergent force system (Also called a center system). It is such a system for which the forces intersect at a single point. They converge at this very point. For such a system, the equilibrium condition is only two equations:
Spatial system (3D) - equilibrium equations
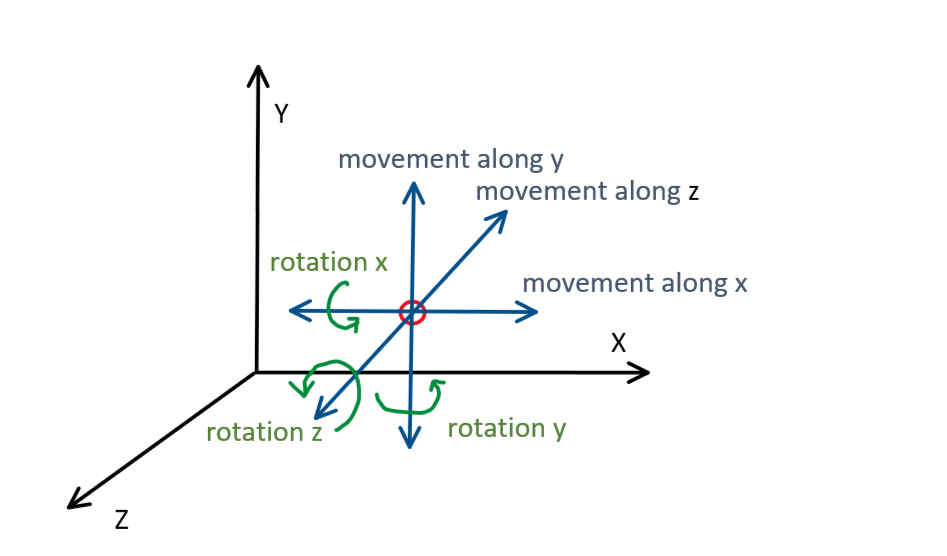
The spatial arrangement has a little more degrees of freedom. There are as many as six of them. For each degree of freedom we have an equation describing the equilibrium equation. So we get six equations. In tasks where we determine the support reactions in spatial systems, finding the solution is more difficult by the fact that we have as many as six equations.




| Remember how many equations so many maximum unknowns. 6 equations = maximum 6 unknowns. |
This means that a body in space can move in three directions and perform rotation around three axes.
That's all about equilibrium equations in statics from me.